
图像处理(3)均值滤波
1 | import cv2 as cv |
图像滤波(低通滤波)
1 | img = cv.imread("def.jpg", cv.IMREAD_COLOR) |
卷积原理
下面说一下卷积的原理。
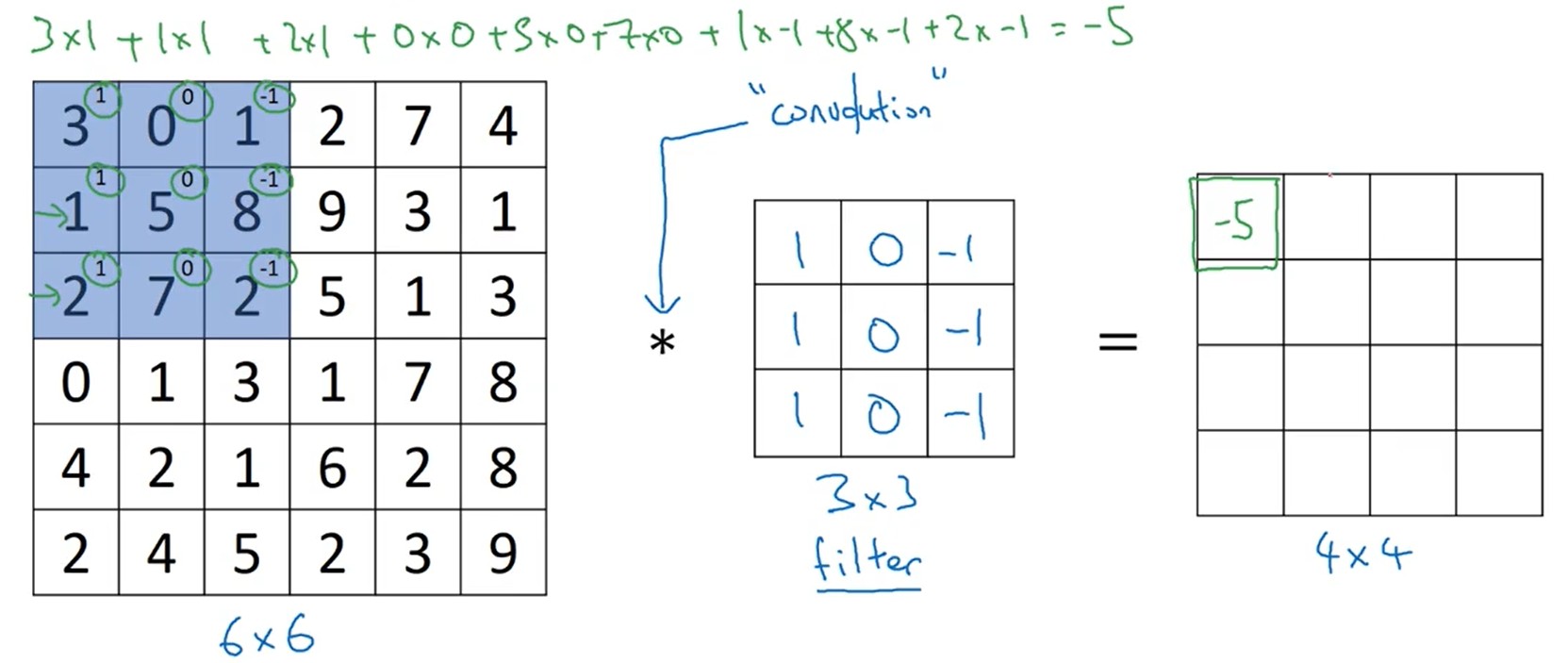
显然,就是拿一个小矩阵在大矩阵上做点积乘法,得到一个值代替原来的像素。所以对于$n\cdot n$的矩阵,假设卷积核shi$m\cdot m$那么卷积之后的结果矩阵大小为$(n-m+1)\cdot (n-m+1)$,如图所示,卷积用来提取特征。
参数还有步长,也就是卷积核每次移动的单位。上面例子默认为1,如果步长为p,那么最终卷积结果的大小为
可以带入尝试,结果正确,下面是代码。
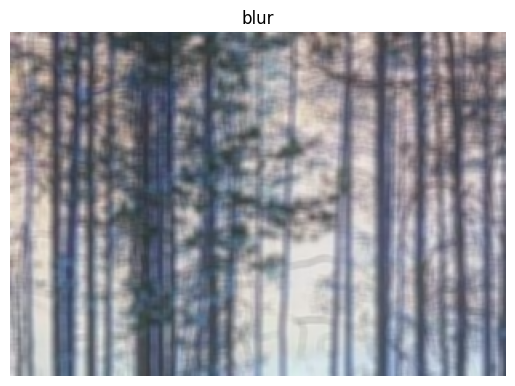
1 | blur = cv.blur(img, (5, 5))#进行平滑处理 |
滤波可以消除高斯噪声,椒盐噪声。
- 椒盐噪声:随机出现的「纯白点」或者「纯黑点」
效果如图所示:
我们从图中可以看出,用卷积运算起到了提取关键信息的作用。
对于上述均值滤波,其意义为字面意思,即取均值,那么卷积核应如下:
这里显然,卷积之后每个元素相当于原来$m\times m$个元素的和的均值!所以系数$\alpha = \frac{1}{m^2}$
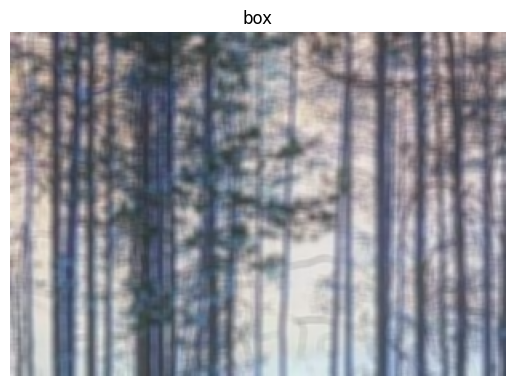
对于这个元素全是1的矩阵来说,起到了正交化的作用。正交化的方盒滤波也成为均值滤波。
1 | #方框滤波 |
高斯滤波
首先,高斯滤波一定是基于高斯分布的,而图像一般有宽和高两个方向,即二维坐标(x, y)。所以我们考虑二维高斯概率密度函数
其中$\mu_1, \mu_2$是x, y的均值,$\sigma_1, \sigma_2$是x, y的标准差,$\rho$是x, y的相关系数!
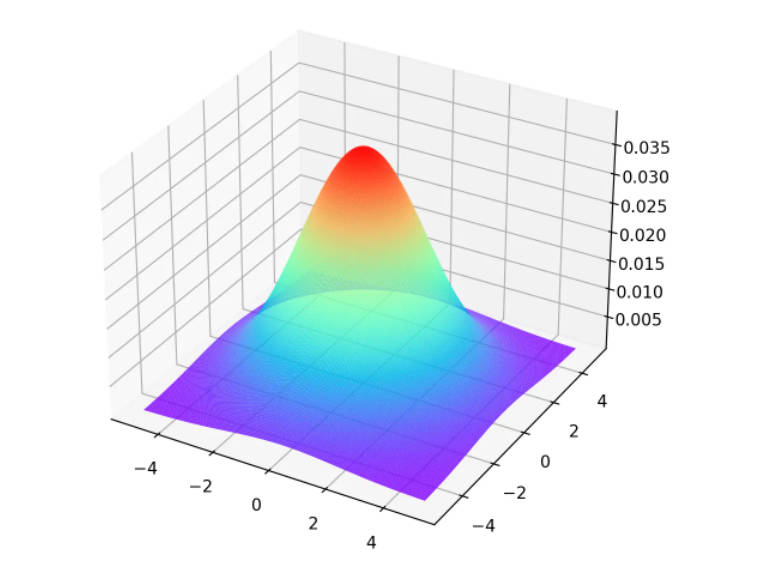
因为二维高斯分布公式十分复杂,所以假设$\mu_1 = \mu_2 = 0, \rho = 0$,公式化简为
这样一看十分简便了。我们假设卷积核中心坐标(x, y) = (0, 0)那么整个卷积核矩阵可以写作
将坐标值带入简化后的二维高斯分布概率密度函数,并且取$\sigma_1 = \sigma_2 = 1.5$
可以算出一个概率密度矩阵,矩阵每个元素的位置就是二维坐标,我们用归一法得到概率值。也就是每个元素除以K的元素和,得到高斯模板卷积核。下面是代码。
1 | #高斯滤波 |
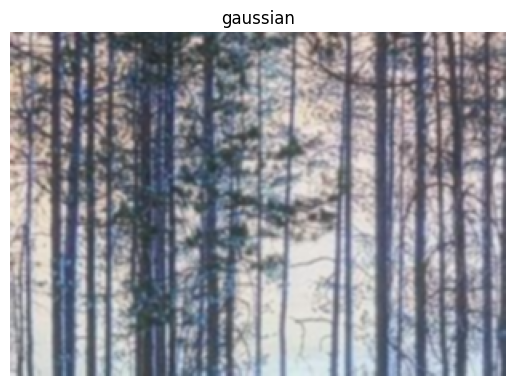
可以看到提取的特征更加明显。
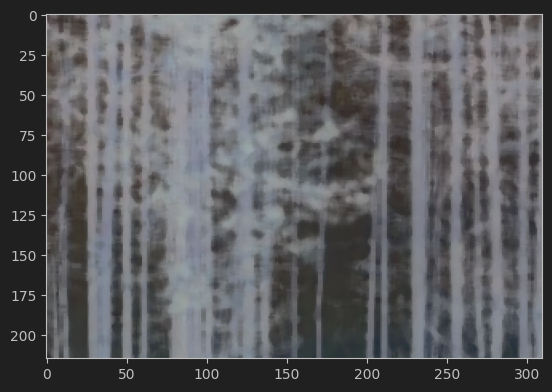
中值滤波
1 | #中值滤波 |
对卷积核框住的像素值进行排序;取中间值作为输出结果。代码在上方,效果如图所示:
1 | #显示所有的 |
双边滤波
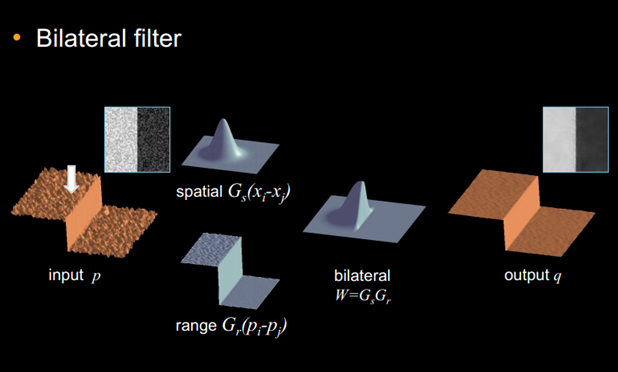
高斯滤波在去除高斯噪声的同时,并没有保护边缘,所以我们用双边滤波保护边缘。我们可以通过相邻像素做差,就可以标记出边缘,差值越大,标记出边缘的可能性越高。它考虑了像素之间的空间距离和像素值的差异,以保留图像中的边缘信息。
我们用一张图简单解释其原理。
传统滤波器(也可以考虑高斯滤波器)
假设给定了像素中心点,那么这个点的像素会被写在矩阵的中心,在其周围表示了周围坐标点的像素。
我们知道,在卷积核中,每个元素表示相应位置的权重,在加权求和的时候,我们想要哪个位置的像素对最终结果的影响大一些,那我们就在卷积核中让相应位置的权重变大,那么如果想要保留一个图像的细节,当然要将其原来的像素值权重设置得很大,而距离原来点越远的点的像素,所占比重应该越来越小,这就是传统滤波器的核函数效果(高斯滤波器就是如此),我们也称其权重分布为空间上的权重分布(spatial),如上图Gs。
那么对于保边(edge preversing)滤波器,或者说双边滤波器,我们来看上图,原图是黑白分界,中间看出一条分界线,如果用高维矩阵进行卷积,很容易就把边一起融合掉了,因为滤波器(加权计算)本身就有模糊噪声的作用。我们想要保住这条分界线,就要考虑第二种权重分布,值域上的权重分布(range),如上图Gr。
值域上的权重分布就是周围像素与中心像素值差越大,那么权重就越小。所以,比如上图中,中心像素在分界线左侧,那么中心点左边的像素值就和他相近,所以分界线左侧的点,权重就大,影响着分界线左侧滤波之后的结果。中心点右边的像素值与中心点像素值差值很大,那么权重就小,所以最后中心点的像素值就主要是左边。
最终的卷积核就是两者函数相乘,$W = G_s \times G_r$(矩阵点乘)得到最终的核函数。
我们来看一下计算。
$G_s(p)$为高斯概率密度函数,卷积核中心点q, 像素坐标$(x_q, y_q)$,卷积核中任意点p, 像素坐标$(x_p, y_p)$。
$G_r(p)$灰度值距离权重,同理我们也用指数函数。卷积核中心点像素计作$I_q$,积核中某一像素$I_p$。
然后对应项相乘即可!
得到最终的双边卷积核。
显然其中的$\sigma_r$参数越大,像素差值的影响就越大。同理,$\sigma_s$越大,点之间距离的影响就越大。
代码如下:
1 | bifilter = cv.bilateralFilter(img, 5, sigmaColor=30, sigmaSpace=30) |
可以看出,边界被很好的保留。
 wechat
wechat


